
Animales como jirafas o caballos aprenden a caminar poco después de nacer. Estudiando cómo lo hacen y para entender sus mecanismos, un equipo ha creado un robot del tamaño de un perro que tarda una hora en aprender a caminar y lo hace usando menos energía.
Los animales nacen con redes de coordinación muscular situadas en la médula espinal y, al principio, las crías dependen en gran medida de estos reflejos, que, aun siendo muy básicos, les ayudan a no caerse en sus primeros pasos.
A continuación, practican un control muscular más avanzado y preciso, hasta que finalmente el sistema nervioso está bien adaptado a los músculos y tendones de las patas, y pueden seguir ya el ritmo de los adultos.
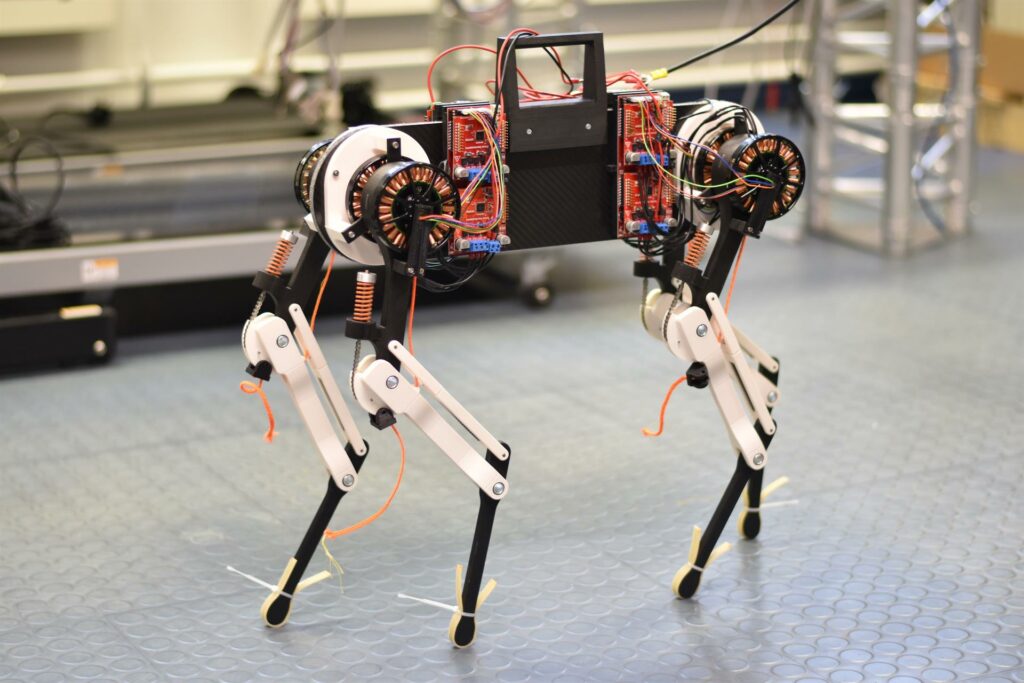
Investigadores del Instituto Max Planck se centraron en cómo aprenden los animales a caminar y a tropezar, para lo que construyeron un robot de cuatro patas, del tamaño de un perro labrador al que bautizaron como Morti. Los resultados se publican en Nature Machine Intelligence.
«Buscamos la respuesta construyendo un robot que tiene reflejos como un animal y aprende de los errores», señaló uno de los autores del estudio, Felix Ruppert.
El algoritmo de aprendizaje adapta los parámetros de control de un generador central de patrones (CPG). En los seres humanos y en los animales, estos CPG son redes de neuronas en la médula espinal que producen contracciones musculares periódicas.
El equipo simuló una médula espinal virtual que colocó donde estaría la cabeza del robot y el CPG se ubicaba en un pequeño ordenador que controla el movimiento de las patas del mecanismo.
Si el robot tropieza, el algoritmo de aprendizaje cambia la distancia de oscilación de las patas hacia adelante y hacia atrás, la velocidad de oscilación de las mismas y el tiempo que una de ellas está en el suelo.
Durante el proceso de aprendizaje, el CPG envía señales motoras adaptadas para que el robot tropiece menos y optimice su marcha.
Si los datos de los sensores no coinciden con los esperados, el algoritmo de aprendizaje cambia el comportamiento de marcha hasta que el robot camina bien y sin tropezar.
El ordenador de Morti solo consume cinco vatios de energía en el proceso de caminar, frente a otros robots cuadrúpedos industriales que han aprendido a funcionar con la ayuda de complejos controladores, los cuales suelen consumir varias decenas y hasta varios cientos de vatios de energía, señala el estudio.
Ambos tipos de robots funcionan de forma dinámica y eficiente, pero el consumo de energía computacional es mucho menor en este nuevo modelo, que además proporciona importantes conocimientos sobre la anatomía de los animales.